Mechanical Design
Chassis | Arm and Claw | Drivetrain | Collision Bumper
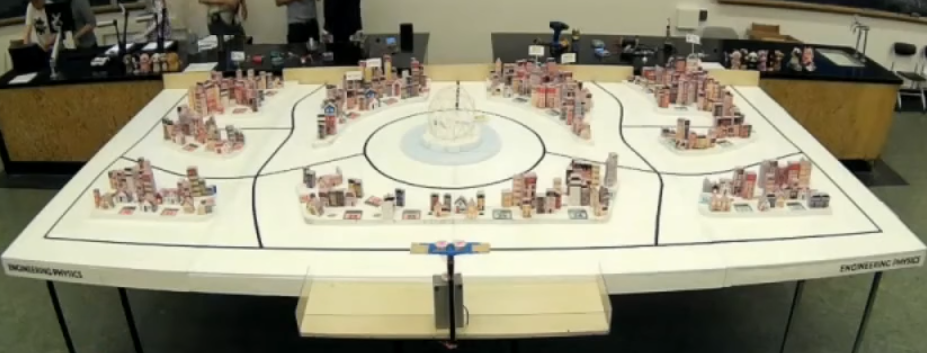
The 2016 Uberbots Competition is the 16th annual robotics design course and competition hosted by UBC Engineering Physics.
In teams of four, students spent 6 weeks designing and building a robot that could:
Chassis | Arm and Claw | Drivetrain | Collision Bumper
Tape-following | Infrared Detection | Signal Processing
PID control | Navigation | Microcontroller Programming
A circular chassis with multiple levels allowed for turning on the spot and detecting collisions from all sides.
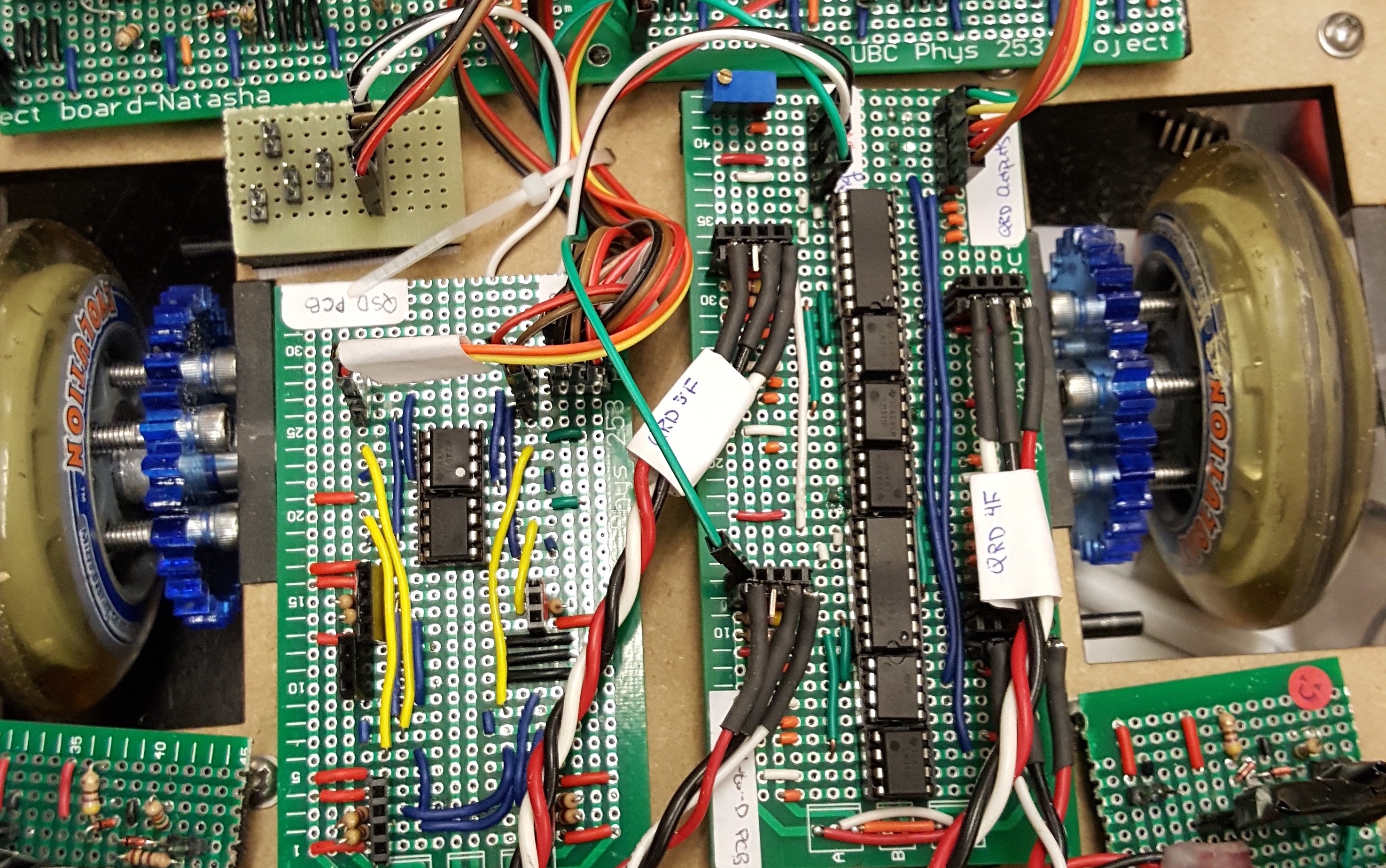
A removable drivetrain module driven by two independent motors allowed for agile maneuvers and a flexible gear ratio.
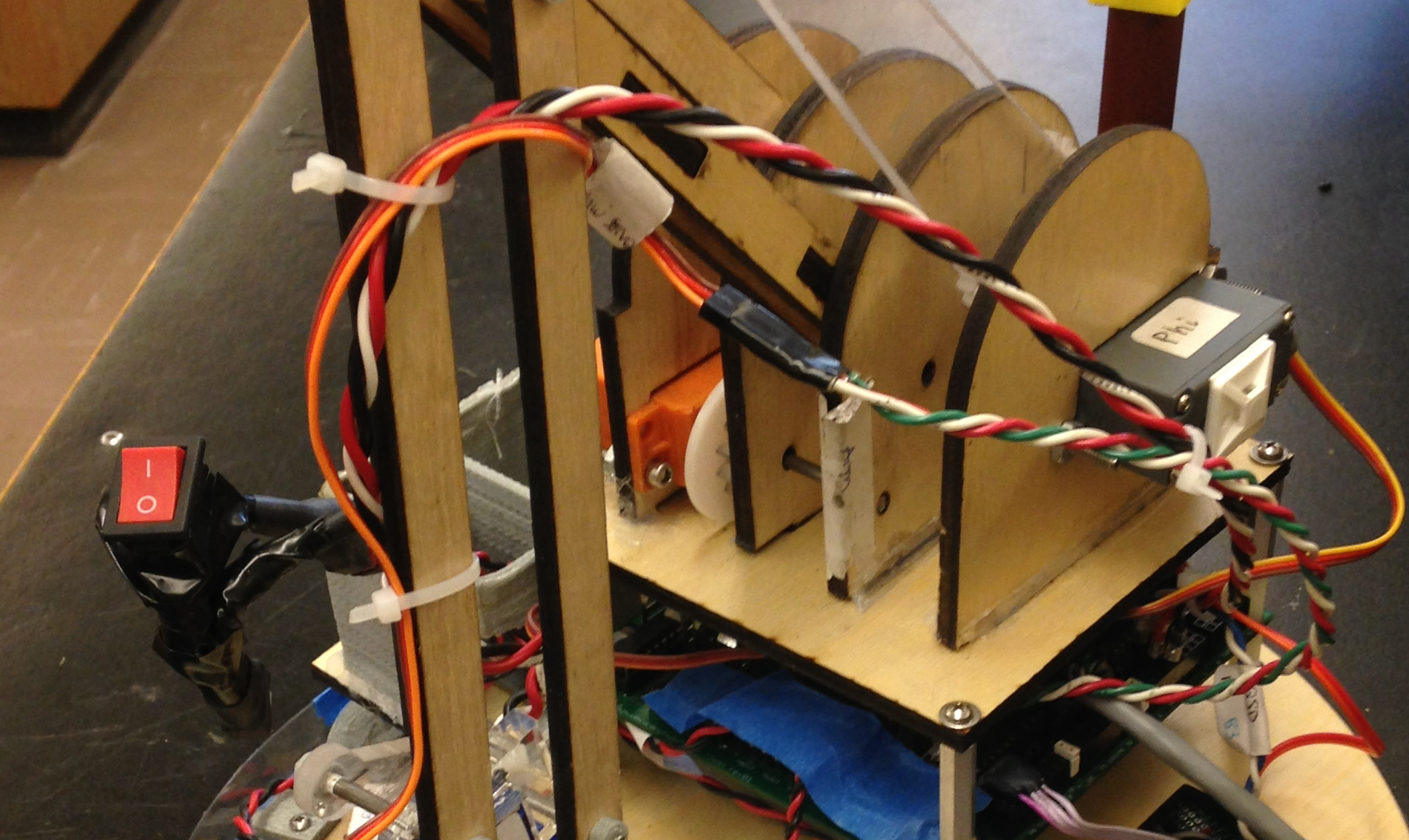
A 3-axis parallel arm was created to reach out for passengers at various distances, with a claw customized to fit passengers' body shape.
QRD1114 Optical Detectors were used in a comparator circuit to determine when the robot was on or off the tape. PID controls were implemented for self-correcting and smooth tape-following maneuvers.
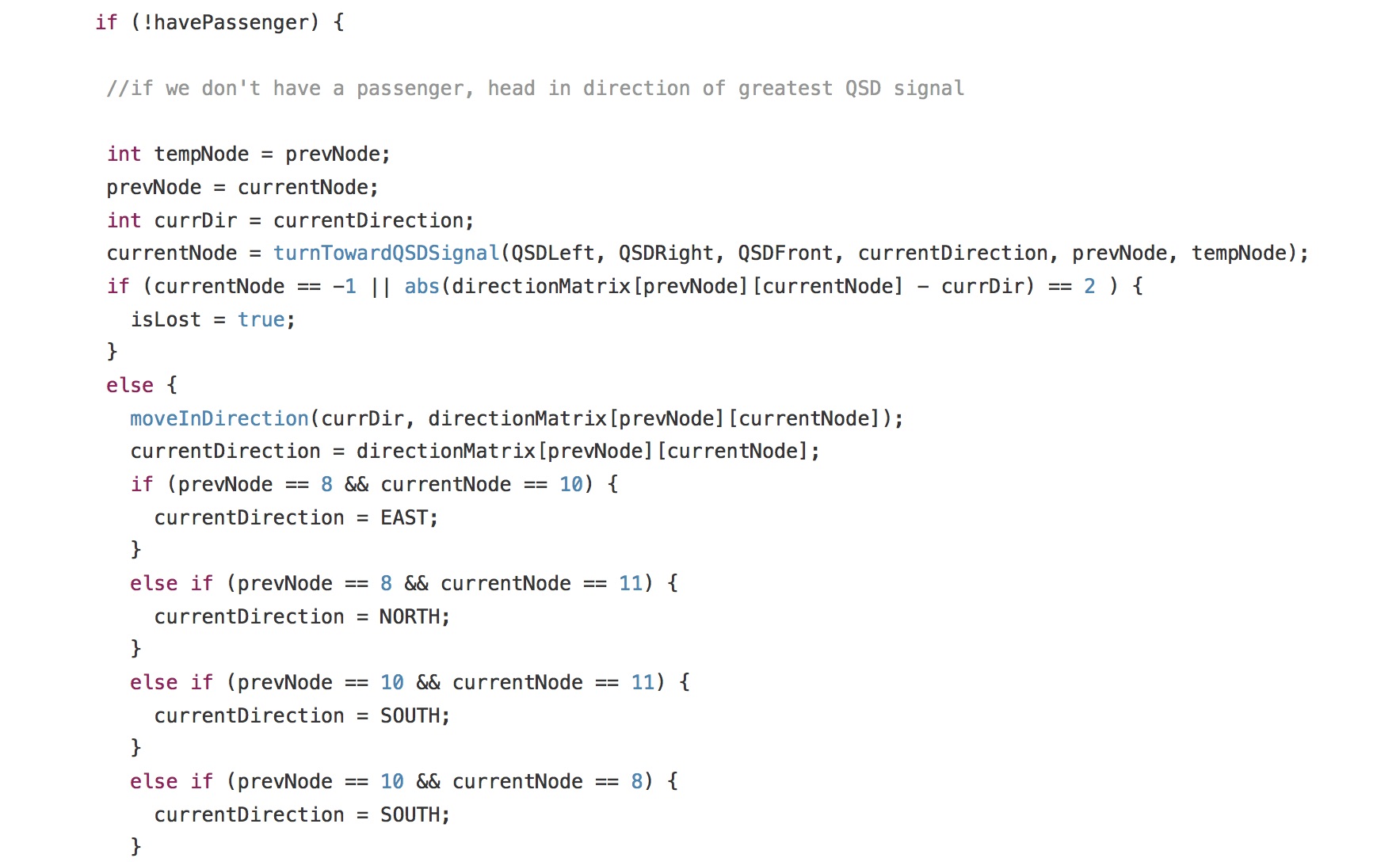
QSD124 Phototransistors were used in with biquad circuits to bandpass filter for 1kHz IR, amplify, and peak detect the signal from passengers and the dropoff zone. IR Sensors were used to faciliate navigation, pickup, and dropoff.
The competition map was stored in our robot, allowing it to calculate the available paths to traverse when seeking passengers and the optimal path to the dropoff once a passenger was acquired.